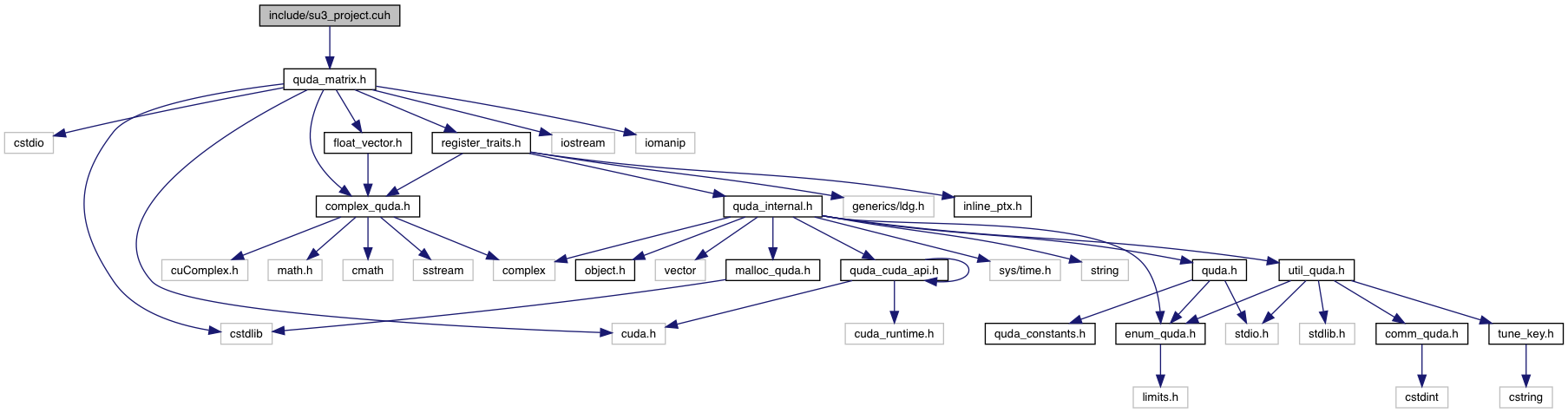
#include <quda_matrix.h>
Include dependency graph for su3_project.cuh:
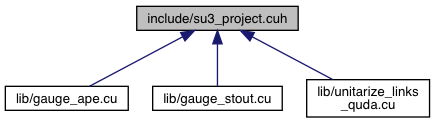
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| quda | |
Functions | |
| template<typename Float2 , typename Float > | |
| __host__ __device__ int | quda::checkUnitary (Matrix< Float2, 3 > &inv, Matrix< Float2, 3 > in, const Float tol) |
| Check the unitarity of the input matrix to a given tolerance. More... | |
| template<typename Float2 > | |
| __host__ __device__ int | quda::checkUnitaryPrint (Matrix< Float2, 3 > &inv, Matrix< Float2, 3 > in) |
| Check the unitarity of the input matrix to a given tolerance (1e-14) and print out deviation for each component (used for debugging only). More... | |
| template<typename Float > | |
| __host__ __device__ void | quda::polarSu3 (Matrix< complex< Float >, 3 > &in, Float tol) |
| Project the input matrix on the SU(3) group. First unitarize the matrix and then project onto the special unitary group. More... | |
Detailed Description
Description
This header file defines an interative SU(3) projection algorithm
Definition in file su3_project.cuh.
